

Computer Vision
Enabling computers and devices to understand what they see.


Project
Lens Fitting for Correction of Lens Aberrations
We present an algorithm that uses a point spread function (PSF) measurement at a single depth to calibrate the nominal lens model to the measured PSF. The fitted model can then be used to compute…
Publication
Multiview Rectification of Folded Documents
Publication
Dunking the data center
Video
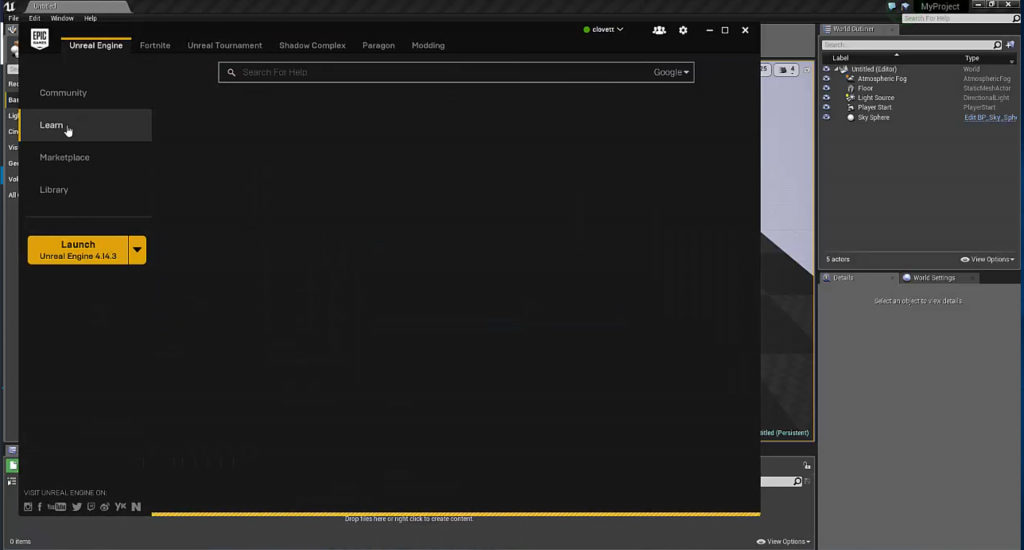
Unreal AirSim Setup from scratch
This shows how to add the AirSim plugin to a new C++ Unreal Project, then add content to it. It also shows how to setup the drone manually.
Video
AirSimDemo
A quick run through on how to setup the AirSim Unreal environment to fly a drone using hardware in the loop simulation.

Project
Aerial Informatics and Robotics Platform
Microsoft AirSim (Aerial Informatics and Robotics Simulation) is an open-source robotics simulation platform. From ground vehicles, wheeled robotics, aerial drones, and even static IoT devices, AirSim can capture data for models without costly field operations.
Video
Aerial Informatics and Robotics Platform
The video shows a simulation of the quadrotor flight in a sub-urban environment. The visuals depict how the camera mounted on the quadrotor perceives the world.

Tool
Test Images for Wallflower Paper
These are test images for developing and evaluating background subtraction for computer vision. There are seven sequences of images, and each sequence comes from a video.