
Publication

Algorithms
Project
Safe Autonomous Flight Everywhere
The goal of this project is to build a generalized vehicle-agnostic system that can provide safety guarantees in the face of an uncertain world. We are defining what “safe” means, and building a theoretical framework…
Video
Indistinguishability Obfuscation for Turing Machines with Unbounded Memory
We show how to build indistinguishability obfuscation (iO) for Turing Machines where the overhead is polynomial in the security parameter lambda, machine description |M| and input size |x| (with only a negligible correctness error). In…

Publication
Efficient Advert Assignment
Video
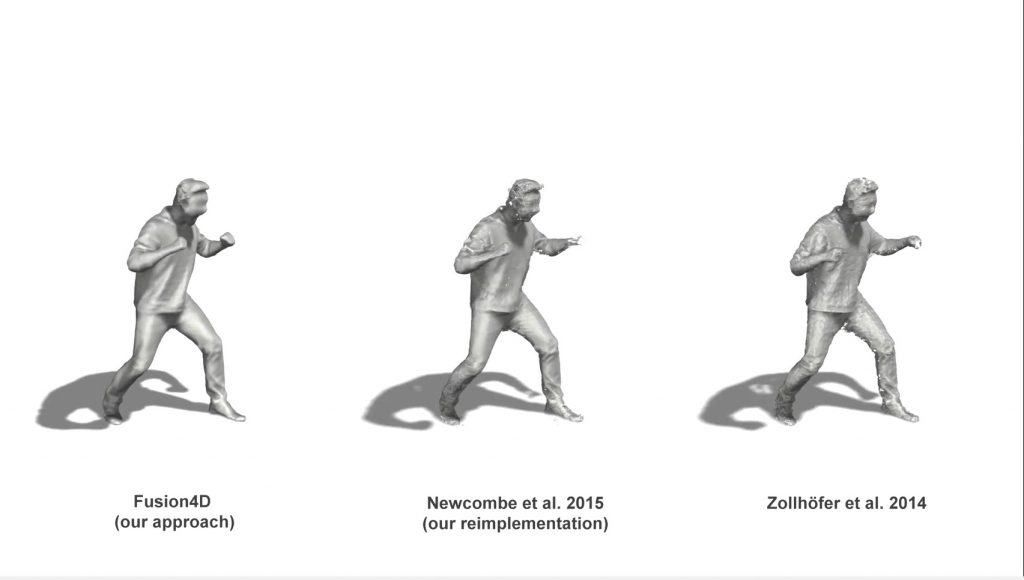
Fusion4D: Real-time Performance Capture of Challenging Scenes
We contribute a new pipeline for live multi-view performance capture, generating temporally coherent high-quality reconstructions in real-time. Our algorithm supports both incremental reconstruction, improving the surface estimation over time, as well as parameterizing the nonrigid…
Publication